В постиндустриальную эпоху, начиная с 80-х годов ХХ века, асинхронный электропривод стал основным потребителем электрической энергии (свыше 60% электроэнергии в промышленности потребляется данными электродвигателями), как наиболее простой, за счет этого и дешевый, и надежный тип двигателя. Большинство секторов экономики стали использовать (или еще более нарастили) двигательную нагрузку в виде: насосных, компрессорных, вентиляционных и т.п. установок. Технологический процесс различных производств зачастую стал требовать изменения частоты вращения каких-либо исполнительных механизмов, например, когда расход водопотребления мал в магистральной сети, достаточно снизить частоту вращения ротора электродвигателя, который приводит в действие магистральный насос, тем самым снизив потребление воды.
В тоже время возникла тенденция к использованию энергосберегающих технологий, снижению потерь электроэнергии, в том числе и в силовых машинах. Ощутимый рост стоимости энергоресурсов, одержимость рационального их использования, а также бурное развитие электронной и вычислительной технике способствовали появлению устройств, предназначенных для экономного управления электродвигателями различного типа.
О том, как обеспечить максимально эффективное управление электроприводом, говорим сегодня.
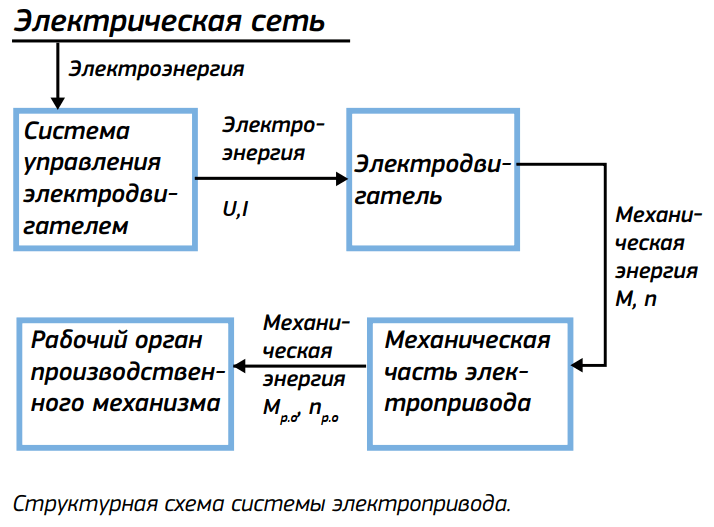
Большая часть электрической энергии, потребляемой производственными и технологическими установками, используется для выполнения какой-либо механической работы. Для приведения в движение рабочих органов различных производственных и технологических механизмов преимущественно используются асинхронные электрические двигатели с короткозамкнутым ротором (в дальнейшем именно о данном типе электродвигателя и будем вести повествование). Сам электродвигатель, его система управления и механическое устройство, передающее движение от вала двигателя к производственному механизму, образуют систему электрического привода.
Наличие минимальных потерь электроэнергии в обмотках за счет регулирования частоты вращения двигателя, возможность плавного пуска за счет равномерного увеличения частоты и напряжения — это основные постулаты эффективного управления электродвигателями.
Ведь раньше и до сих пор существуют такие способы управления двигателем, как:
- реостатное регулирование частоты, путем введения дополнительных активных сопротивлений в цепи обмоток двигателя, последовательно закорачиваемых контакторами;
- изменение напряжения на зажимах статора, при этом частота такого напряжения постоянна и равна частоте промышленной сети переменного тока;
- ступенчатое регулирование путем изменения числа пар полюсов статорной обмотки.
Но эти и другие способы регулирования частоты несут с собой главный недостаток — значительные потери электрической энергии, а ступенчатое регулирование по определению является недостаточно гибким способом.
Потери неизбежны?
Остановимся более подробно на электрических потерях, возникающих в асинхронном электродвигателе.
Работа электрического привода характеризуется целым рядом электрических и механических величин.
К электрическим величинам относятся:
- напряжение сети,
- ток электродвигателя,
- магнитный поток,
- электродвижущая сила (ЭДС).
Основными механическими величинами являются
- частота вращения n (об/мин),
- вращающийся момент M (Н•м) двигателя,
- механическая мощность электродвигателя P (Вт), определяемая произведением момента на частоту вращения:
P=(M•n)/(9,55) (1)
Для обозначения скорости вращательного движения наряду с частотой вращения n используется и другая известная из физики величина — угловая скорость ω, которая выражается в радианах за секунду (рад/с). Между угловой скоростью ω и частотой вращения n существует следующая связь:
ω=(2•π•n)/60=n/(9,55),
при учете которой формула приобретает вид:
P=M•ω (2)
Зависимость вращающего момента двигателя M от частоты вращения его ротора n называется механической характеристикой электродвигателя. Отметим, что при работе асинхронной машины со статора на ротор передается через воздушный зазор с помощью электромагнитного поля так называемая электромагнитная мощность:
![]()
Часть этой мощности передается на вал ротора в виде механической мощности согласно выражению (2), а остальная часть выделяется в виде потерь в активных сопротивлениях всех трех фаз роторной цепи.
Эти потери, называемые электрическими, равны:
![]()
Таким образом, электрические потери определяются квадратом тока, проходящего по обмоткам.
Они в сильной степени определяются нагрузкой асинхронного двигателя. Все другие виды потерь, кроме электрических, изменяются с нагрузкой менее существенно.
Поэтому рассмотрим, как изменяются электрические потери асинхронного двигателя при регулировании частоты вращения.
Электрические потери непосредственно в обмотке ротора электродвигателя выделяются в виде тепла внутри машины и потому определяют ее нагрев. Очевидно, чем больше электрические потери в цепи ротора, тем меньше КПД двигателя, тем менее экономична его работа.
Учитывая, что потери в статоре примерно пропорциональны потерям в роторе, еще более понятно стремление уменьшить электрические потери в роторе. Тот способ регулирования частоты вращения двигателя является экономичным, при котором электрические потери в роторе относительно невелики.
Из анализа выражений следует, что самый экономичный способ управления двигателями заключается в частоте вращения ротора близкой к синхронной.
Частотно-регулируемые приводы
В обиход различных сфер промышленности, которые используют насосное, вентиляционной оборудование, производства, использующие конвейерные установки, объекты генерации (ТЭЦ, ГРЭС и т.п.) и многих других, вошли такие установки как частотно-регулируемые привода (ЧРП), также называемые — преобразователями частоты (ПЧ). Данные установки и позволяют изменять частоту и амплитуду трехфазного напряжения, поступающего на электродвигатель, за счет чего и достигается гибкое изменение режимов работы управляющих механизмов.

Высоковольтный частотно-регулируемый привод
Конструктив ЧРП
Приведем краткое описание существующих преобразователей частоты.
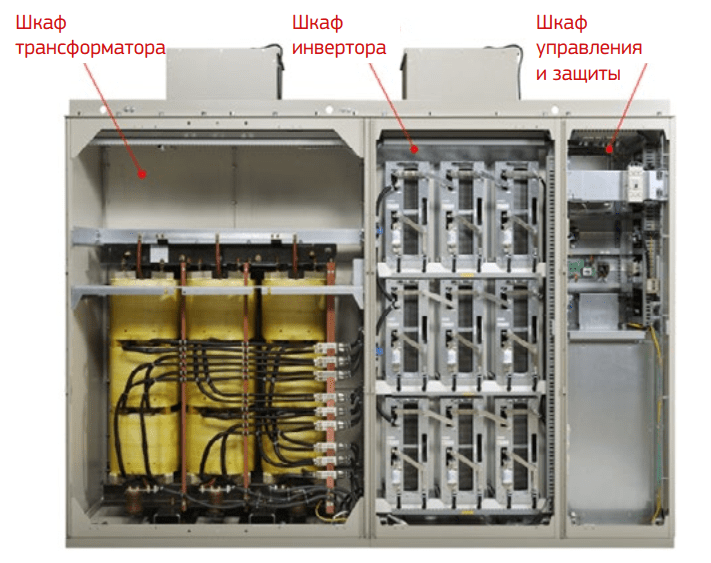
Конструктивно преобразователь состоит из функционально связанных блоков: блока входного трансформатора (шкаф трансформатора); многоуровневого инвертора (шкаф инвертора) и системы управления и защит с блоком ввода и отображения информации (шкаф управления и защит).
В шкафу входного трансформатора производится передача энергии от трехфазного источника питания входным многообмоточным трансформатором, который распределяет пониженное напряжение на многоуровневый инвертор.
Многоуровневый инвертор состоит из унифицированных ячеек – преобразователей. Количество ячеек определяется конкретным конструктивом и заводом-изготовителем. Каждая ячейка, оснащена выпрямителем и фильтром звена постоянного тока с мостовым инвертором напряжения на современных IGBT транзисторах (биполярный транзистор с изолированным затвором). Первоначально выпрямляется входной переменный ток, а затем с помощью полупроводникового инвертора преобразуется в переменный ток с регулируемой частотой и напряжением.
Полученные источники управляемого переменного напряжения соединяются последовательно в звенья, формируя фазу напряжения. Построение выходной трехфазной системы питания асинхронного двигателя производится включением звеньев по схеме «ЗВЕЗДА».
Система управления защиты располагается в шкафу управления и защиты и представлена многофункциональным микропроцессорным блоком с системой питания от источника собственных нужд преобразователя, устройством ввода-вывода информации и первичными сенсорами электрических режимов работы преобразователя.
Потенциал экономии: считаем вместе
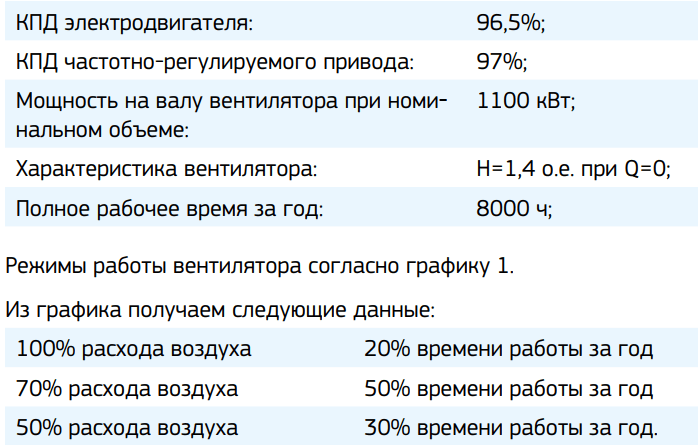
На основании данных, предоставленных компанией Mitsubishi Electric, оценим потенциал энергосбережения при внедрении преобразователей частоты.
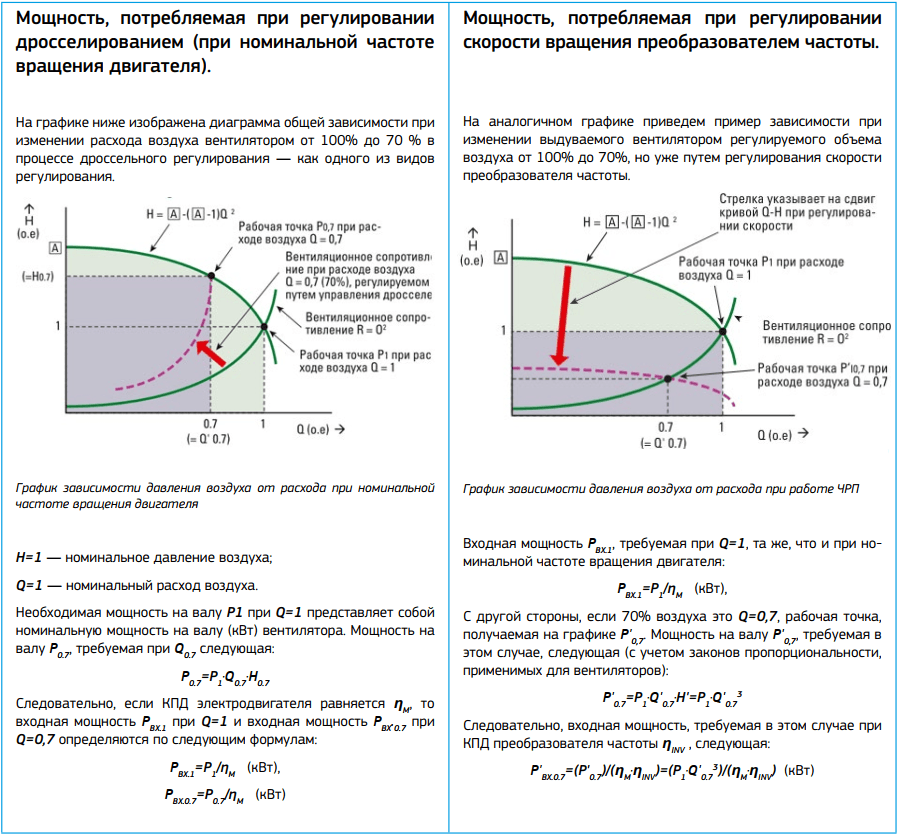
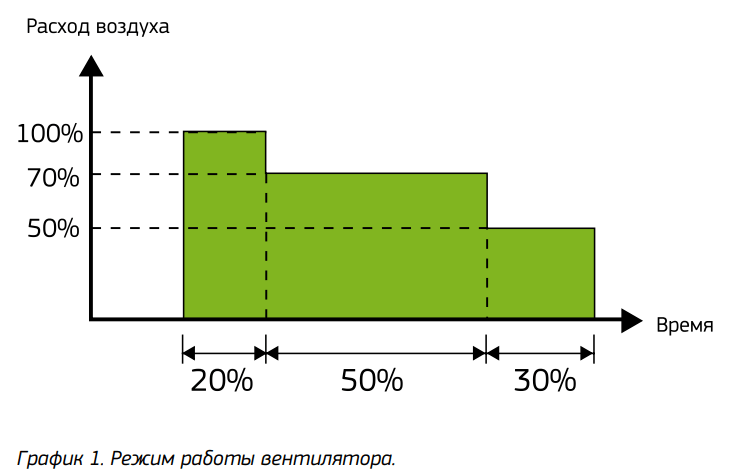
Вначале посмотрим, как меняется мощность при различных режимах регулирования двигателя:
А теперь приведем пример расчета:
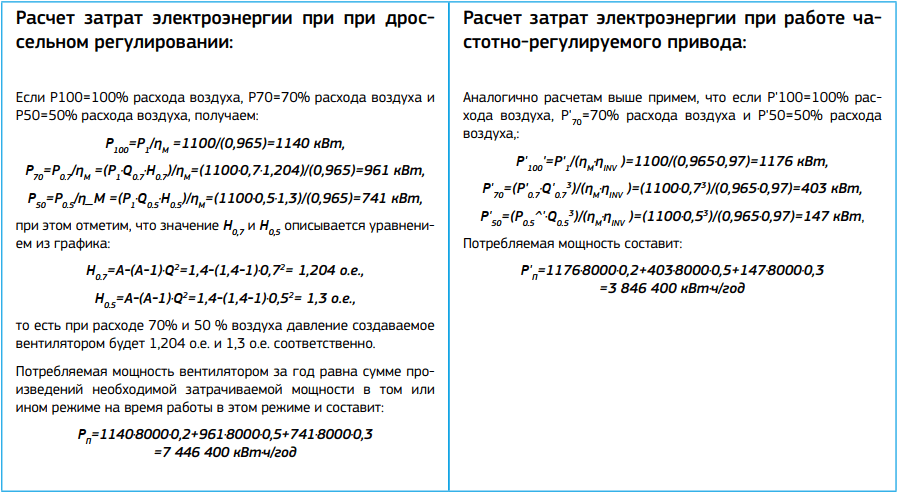
Экономия между работой под номинальной нагрузкой и работой с возможностью регулирования скорости вращения двигателя (работа совместно с ЧРП) равна:
7 446 400 кВт•ч/год — 3 846 400 кВт•ч/год= 3 600 000 кВт•ч/год
Учтем тариф на электроэнергию равным — 1 кВт•ч / 5,5 руб. Стоит отметить, что стоимость взята по первой ценовой категории и усредненному значению для одного из промышленных предприятий Приморского края за 2019г.
Получим экономию в деньгах:
3 600 000 кВт•ч/год•5,5 руб/кВт•ч= 19 800 000 руб/год
Практика реализации подобных проектов позволяет с учетом затрат на эксплуатацию и ремонты, а также стоимости самих преобразователей частоты, добиться срока окупаемости в 3 года.
Как показывают цифры, в экономической целесообразности внедрения ЧРП сомневаться не приходится. Однако одной экономикой эффект от их внедрения не ограничивается. О том, как ЧРП осуществляют плавный пуск двигателя, значительно уменьшая его износ, читайте в следующих выпусках журнала.
Список источников:
1. «Регулирование частоты вращения двигателей», Л. Б. Масандилов, В. В. Москаленко, 1978 г.
2. https://www.mitsubishielectric.ru/